西門子1200PLC實用定位控制程序案例

本文是一篇綜合性非常強的文章,從PLC輸入輸出及步進電機接線開始,到PLC運動控制程序編寫,再到後續的ModbusTCP通信協議及上位機編程實現最終控制,涉及知識面比較廣,能夠讓我們很好地将所學知識結合起來。
2. 項目開發平台采用西門子TIA Portal V15編程軟件編寫運動控制程序,實現PLC(S7-1200系列:CPU1214C DC/DC/DC )對步進電機的控制,再通過編寫ModbusTCP程序,将控制地址進行映射,從而方便上位機(VS 2019開發)與PLC進行通信,最終實現步進電機的運動方向、速度及距離的靈活控制。
涉及硬件:開關電源、S7-1200PLC、步進驅動器、步進電機、單軸模組、限位開關
涉及軟件:TIA Portal V15、VS2019、ModbusPoll(用于測試通信)
3. 硬件接線 4. PLC編程步 驟操作說明1通過博圖軟件創建一個新的PLC項目,根據硬件型号插入新設備,這裡為CPU 1214C DC DC DC
2雙擊PLC的以太網口,設置IP地址,這裡設置為192.168.2.210
3雙擊CPU,在脈沖發生器PTO/PWM選項中設置信号類型為PTO,脈沖輸出為Q0.0,方向輸出為Q0.1
4新建一個工藝對象,名稱為軸1,通過基本參數>驅動器,設置脈沖輸出為Pulse1
5通過擴展參數>位置限制,設置上下限位分别為I0.1和I0.2
6通過擴展參數>回原點>主動,設置原點開關為I0.0
7程序段1,調用MC_Power使能,各個引腳填寫如圖所示,其中Asix選擇軸1
8程序段2,調用MC_MoveRelative,各個引腳填寫如圖所示,該程序段主要用于執行相對運動
9程序段3,調用MC_MoveAbsolute,各個引腳填寫如圖所示,該程序段主要用于執行絕對運動
10程序段4,調用MC_MoveJog,各個引腳填寫如圖所示,該程序段主要用于執行前進和後退點動
11程序段5,調用MC_Home,各個引腳填寫如圖所示,該程序段主要用于執行歸零
12程序段6,調用MC_Reset,各個引腳填寫如圖所示,該程序段主要用于執行複位功能
13程序段7,調用MC_Halt,各個引腳填寫如圖所示,該程序段主要用于執行暫停功能
14程序段8,調用MC_ReadParam,來讀取相關參數,各個引腳填寫如圖所示,該程序段主要用于讀取實時脈沖
5. 上位機開發思路目前比較主流開發上位機的方式,主要是組态軟件(觸摸屏)、C#開發上位機,C#開發上位機與傳統的組态軟件之間的區别,主要體現在如下三個方面:
功能限制:組态軟件對于一些特定的需求或者邏輯,會有一定的局限性,使用上也受到軟件本身的約束;C#開發上位機完全自主開發,幾乎不存在功能上的限制,并且擴展方便。 技術要求:組态軟件最大的優勢在于方便,因為它本身都集成了一些通用協議和軟件,隻需要按照使用說明進行組态配置即可;C#開發需要完全自己搭建框架和實現底層代碼,對開發者的技術要求會更高一些。 價格成本:組态軟件需要按套、按點位收費,意味着每個項目無形中都有一個基礎成本;C#開發上位機自主開發,不需要二次授權費用,并且開發一套之後,可以快速應用到其他項目中。采用C#上位機開發,首先需要考慮的是通信問題。西門子S7-1200支持很多種不同的通信協議,包括S7、ModbusTCP、TCP/IP、UDP、OPC等,從開發成本上來說,我們優先考慮S7和ModbusTCP,對于S7和ModbusTCP通信協議,比較一下兩者的優缺點:
S7協議為西門子内部協議,協議本身不公開,需要調用或者自己開發通信庫,使用S7通信協議需要勾選CPU中的允許來自遠程對象的PUT/GET通信訪問。 ModbusTCP為公開、免費協議,可以自己開發通信庫或者使用開源庫,使用ModbusTCP通信協議需要編寫一定的PLC程序來實現地址映射。從公開免費和使用範圍的角度來考慮,這裡采用ModbusTCP通信協議,因為學會了ModbusTCP,意味着市場上的大部分儀表、PLC通信都可以搞得定,PLC程序編寫如下如下所示:
創建DB塊這裡首先創建一個DB塊,裡面包含了常用的一些操作和參數設置,值得注意的是,由于Modbus保持型寄存器的Bit位操作比較麻煩,因此這裡我們統一使用Word類型來代替Bit。 Modbus地址與PLC地址的映射(控制位) Modbus地址與PLC地址的映射(參數地址) ModbusServer程序編寫 上位機UI界面設計 ModbusTCP通信庫上位機開發功能實現的核心在于ModbusTCP通信庫編寫,由于Modbus協議是公開免費,可以自己根據Modbus協議來開發,也可以使用開源的Modbus庫,如NModbus等,有了ModbusTCP通信庫之後,我們可以将更多的精力放在業務處理及邏輯處理上面。 6. 上位機功能開發 首先創建一個Windows窗體應用項目,項目名稱為thinger.com.MotionPro。 日志顯示功能:日志顯示采用ListView進行顯示,綁定一個ImageList用來區分信息、報警、錯誤,添加日志方法的參數包含日志等級及日志内容。 自己開發ModbusTCP通信庫或者使用開源庫,該庫應該具備建立連接、斷開連接、預置寄存器、讀取寄存器的功能。 建立連接和斷開連接:這裡通過按鈕實現建立連接和斷開連接2個功能。 相對位置運動:設置相對運動速度和相對運動位置,實現電機的相對運動。 絕對位置運動:設置絕對運動速度和絕對運動位置,實現電機的相對運動。 點動運動模式:設置點動運動速度,按住正向點動或者反向點動,實現電機的點動運動。 回原點模式:點擊回原點,可以控制物體回到原點位置并停止。 運動停止、運動暫停、複位相關功能。上一篇
美麗的茉莉花
最新文章
-

太師修行問答48:人生隻是演戲瑜伽也能修禅,能達到幾禅
7分鐘前 -
![[書法]閑暇草書彙03](https://m.74hao.com/zb_users/upload/2024/10/202410161729086639361289.png)
[書法]閑暇草書彙03
24分鐘前 -
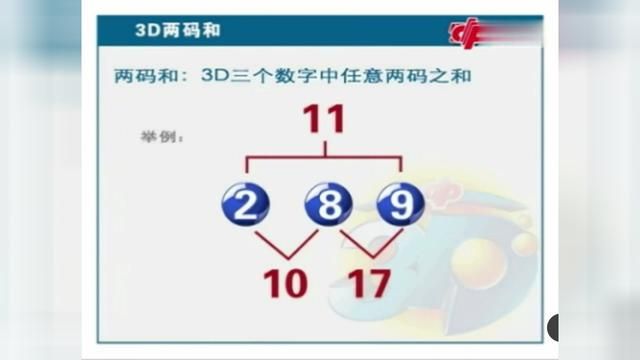
3D技巧:兩碼和差選号法
46分鐘前 -
“落日無情最有情,遍催萬樹暮蟬鳴”楊萬裡詩五首,風格清新自然
1小時前 -
《玄理賦》五行生克的太過不及 等
1小時前 -

《老山1984-1989,中越老山之戰實錄》連載之二:118團8連收敲掉54
2小時前 -

攝影:故鄉的秋色(2)
2小時前 -

論入宅歸火擇吉(續)第二,坐向要吉 坐向要吉,主要是指所選日課
2小時前








有話要說...